GaoQ's Blog
坐标系变换
预计阅读时间: 12 分钟1. 坐标系统
基本概念
实际上,每经过一个矩阵变换,就已经是进入另一个坐标系统了。
1.1 坐标系统类型
1.1.1 物体坐标 (Local Coordinate)
定义
- 又称局部坐标 (local coordinate or object coordinate)
- 每个物体建模的时候都有自己的坐标系
1.1.2 世界坐标 (World Coordinate)
定义
- 3D世界的全局坐标系统
- 其他的模型都按照这个坐标的位置放置
- 是经过
model-matrix转换得到
1.1.3 观察坐标 (View Coordinate)
定义
- 又称视图坐标、投影坐标、眼坐标 (view coordinate/eye coordinate)
- 投影就是把坐标转换到相对于观察者的视角下的坐标
- 以观察者为坐标原点的坐标,经过观察矩阵得到
view-matrix把所有的世界坐标变换为相对于摄像机位置与方向的观察坐标
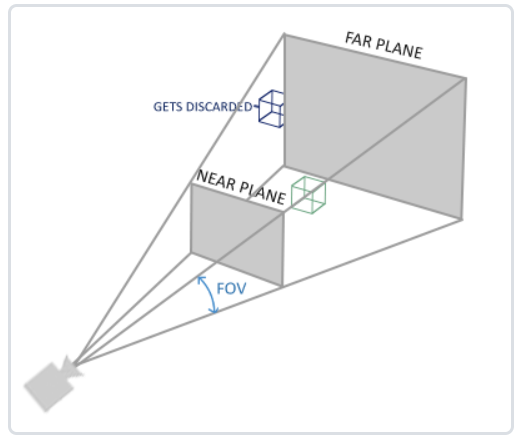
1.1.4 裁剪坐标 (Clip Coordinate)
重要概念
- 通过
projection-matrix转换得到 - 考虑远近平面、FOV以及对z的非线性转换
- 把特定的坐标转换成标准设备坐标的过程
- 舍弃标准设备坐标范围外的坐标
- 投影矩阵与相机的平截头体的参数定义相关
- 用来计算深度缓冲的变换
深度精度优化
- 投影矩阵包含了对z值的精度非线性调整
- 这给了近处的物体很大的深度精度
- 从观察者视角变换z值的方程嵌入在投影矩阵中
- 当将顶点坐标从观察空间转到裁剪空间时,这个非线性方程就被应用了
- 虽然视角上仍然是观察空间的,但是坐标的值已经发生变换,得到的已经是裁剪空间
1.1.5 屏幕坐标 (Screen Coordinate)
定义
- 经过视口变换(viewport transform)得到
- 最后变换出来的坐标将会送到光栅器
- 转化为片段,提供给下一阶段使用(片段着色器)
- 最后得到屏幕像素(和屏幕坐标有区别,屏幕坐标不一定是整数)
1.2 坐标变换流程
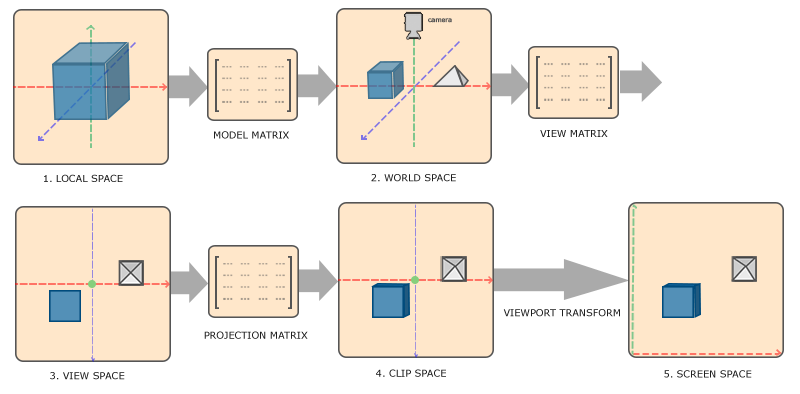
渲染管线中的坐标转换
以上1-4步发生在顶点着色器中:
- 顶点着色器输出的是经过投影矩阵计算得到的裁剪空间的顶点坐标
- 被赋值到顶点着色器中的
gl_Position - 然后进入下一阶段的管线
- OpenGL将会自动进行透视除法和裁剪(根据相机定义的远近平面和FOV)
- 经过视口变换后,最后才会传递到片元着色器
- 片段着色器后才是混合与深度测试(也有提前深度测试,发生在片段着色器之前)

透视除法与裁剪
- OpenGL对裁剪坐标执行透视除法将它们变换到标准化设备坐标
- 然后用
glViewPort内部的参数将标准化设备坐标映射到屏幕坐标 - 透视除法:顶点着色器之后,OpenGL会自动执行的一步,将xyz向量分别除以齐次向量w
- 裁剪空间中坐标只是计算了值,并没有进行裁剪
- 裁剪发生在透视除法之后,超出范围的值会被丢弃
- 这里具体过程下次复习时,需要结合【十、高级OpenGL】中关于深度的知识
2. 左右手坐标系
Three.js使用右手坐标系
2.1 右手坐标系
- 沿着正y轴方向伸出你的右臂,手指着上方
- 大拇指指向右方
- 食指指向上方
- 中指向下弯曲90度
2.2 左手坐标系
- 沿着正y轴方向伸出你的左臂,手指着上方
- 大拇指指向右方
- 食指指向上方
- 中指向下弯曲90度
主要区别
左右手坐标系的区别:z轴的方向相反
3. 变换
3.1 向量
定义
向量是有方向有大小的量,具有两个特征:
- 有大小
- 有方向
- 表示的是一个空间的方向
3.2 向量的长度
3.3 向量的运算
3.3.1 向量与标量(常量)运算
基本运算
- 加减乘除:向量每个分量和标量分别计算,得到新的向量
- 减和除都只能向量-/标量,标量-/向量没有意义
- 个人理解的原因:常量是一维的,而向量是多维的,多维可以在每个维度上运算,即多维可以降维,单维无法升维
- 向量取反:乘-1即可
3.3.2 向量之间的运算
加减法
几何意义
- 加法:对应的分量加减即可
- 几何意义:两个向量平移后首尾相连,起点到终点的连线
- 减法:
- 几何意义:被减数的向量指向减数向量的连线
向量的乘法
点乘
定义与应用
- 定义:点乘等于它们的数乘结果(两个向量长度相乘)乘以两个向量之间夹角的余弦值
- 公式:v⋅k=||v||⋅||k||⋅cosθ
- 如果两个都是单位向量,则点乘的结果就是两个向量之间夹角的cos值
- cos0是1,cos90是0,由此可以判断向量是否平行或相交
- 应用:单位向量的点乘可以用来计算两个向量之间的角度,从而判断垂直
- 每个分量相乘结果相加,再通过反余弦函数即可求出角度
- 如果不是单位向量,可以先标准化,再去计算!!

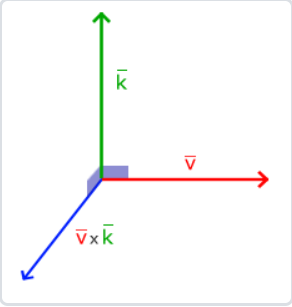
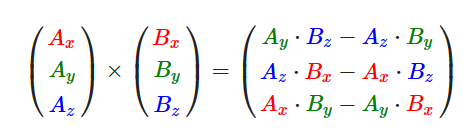
叉乘
特性
- 需要两个不平行向量作为输入
- 生成一个正交于两个输入向量的第三个向量
- 如果输入的两个向量也是正交的,那么叉乘之后将会产生3个互相正交的向量
3.4 矩阵
定义
矩阵是一个矩形的数字符号表达式(i行j列),所谓的行列式
3.4.1 矩阵的加减
运算规则
和向量同样的道理,只能矩阵加减标量,或者维度相同的矩阵,才是有意义的
3.4.2 矩阵的数乘
运算规则
每个元素与标量相乘得到新的矩阵,这个标量就相当于一个放大因子
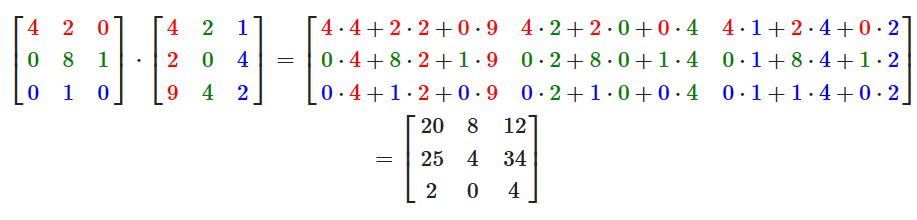
3.4.3 矩阵的乘法
限制条件
两个限制:
-
只有当左侧矩阵的列数与右侧矩阵的行数相等,两个矩阵才能相乘
- 因为乘法的法则是拿左侧矩阵的第n行的每个数分别乘以右侧矩阵的第m列,结果相加,得到坐标为(n,m)的结果
- 所以:左侧矩阵的每一行的元素个数(列数),需要与右侧矩阵的每一列的元素数量(行数)相等
-
矩阵相乘不遵守交换律(Commutative),也就是不能交换位置
- 左乘和右乘的结果不同
- 但是,矩阵遵守乘法结合律,所以可以通过一个矩阵的逆矩阵来求出变换矩阵
3.4.4 矩阵与向量相乘
运算规则
- 向量可以看成N维的矩阵(只有一列) Nx1的矩阵
- 所以可以和一个MxN的矩阵相乘
- 单位矩阵: 对角线是1,其他值是0的矩阵

3.4.5 矩阵的作用
Three.js中的实现
three.js中的matrix是一个列秩的数组,索引0,5,10的值是x,y,z的缩放因子
缩放变换
缩放类型
- 对角线的值就是缩放的分量
- 均匀缩放:每个缩放的分量相等
- 不均匀缩放:分量不相等
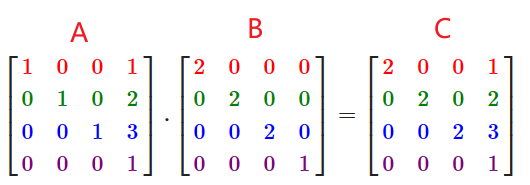
位移变换
实现方式
- three.js中的matrix是一个列秩的数组,索引12,13,14的值是x,y,z的位移值
- 单位矩阵中,使用齐次坐标实现位移
- 在第4个分量(w)上,书写需要位移的分量,通过矩阵相乘即可
旋转变换
略复杂,使用四元数
3.4.6 矩阵的组合
强大之处
矩阵变换的力量是可以把多个变换组合到一个矩阵中
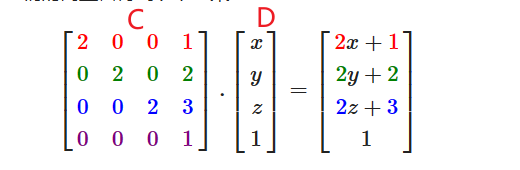
注意事项
-
注意1:矩阵的乘法不遵守乘法交换律
- 所以这里矩阵A * B 得到的结果与向量D相乘,即 A * B * D
- 由于B离矩阵D最近,所以实际的变换顺序是先应用了矩阵B,然后才是矩阵A
- 矩阵左乘向量,因为向量总是在最后,所以越在后面的矩阵,越早进行变换
-
注意2:变换顺序很重要
- 先缩放再位移和先位移再缩放得到的结果不一样!!
- 在组合矩阵时,推荐顺序:先进行缩放操作,然后是旋转,最后才是位移
- 否则它们会(消极地)互相影响。例如,如果你先位移再缩放,位移的向量也会同样被缩放
目录